WalkerGuard-EmbeddedSystem
基於 NVIDIA Jetson Nano 的智慧交通違規取締系統,結合雙視角追蹤與車牌辨識,實現即時違規偵測與取證。
Embedded Systems TensorRT NVIDIA Jetson Computer Vision Deep Learning AppleML Edge AI Full Stack IoT
一、 摘要
這個專題的出發點是希望讓交通執法更加即時與精準。 我們設計並完成了 WalkerGuard-EmbeddedSystem —— 一套以 NVIDIA Jetson Nano 為核心的智慧交通違規取締系統。
透過 TensorRT 模型加速、雙視角追蹤 (Homography) 與 高速車牌捕捉,系統能即時偵測「車輛未禮讓行人」的違規行為,並自動完成取證。
整合的模組包含:
- CoreML 車牌辨識 (Swift App)
- PaddleOCR 車牌比對
- YOLOv8 + TensorRT 的行人與車輛偵測
- Homography 跨視角追蹤技術
二、 研究動機與研究問題
行人過馬路未被禮讓,是導致事故的常見原因。但傳統監控受限於單一視角,常無法提供完整取證。 因此我們設定三個挑戰:
- 突破視角限制:結合地面與空中雙視角,進行協同追蹤。
- 強化辨識能力:高速車牌捕捉 + 行人行為偵測。
- 提升即時性:模型必須能在嵌入式裝置即時推理。
三、 文獻回顧與探討
我們參考了以下技術:
- YOLO 系列:物件偵測主流模型,適合即時偵測。
- VisDrone:公開空拍影像資料集,幫助我們做多視角實驗。
- CoreML:讓 iPhone 端能本地化辨識,不依賴網路。
- Homography:將不同攝影視角的座標投影到同一平面。
- PaddleOCR:高效能開源 OCR 框架,用於車牌辨識。
四、 方法及步驟
系統設計
我們先規劃了系統的模型訓練與部署流程,並設計了完整的架構:

模型 COREML TENSORRT 量化介紹圖
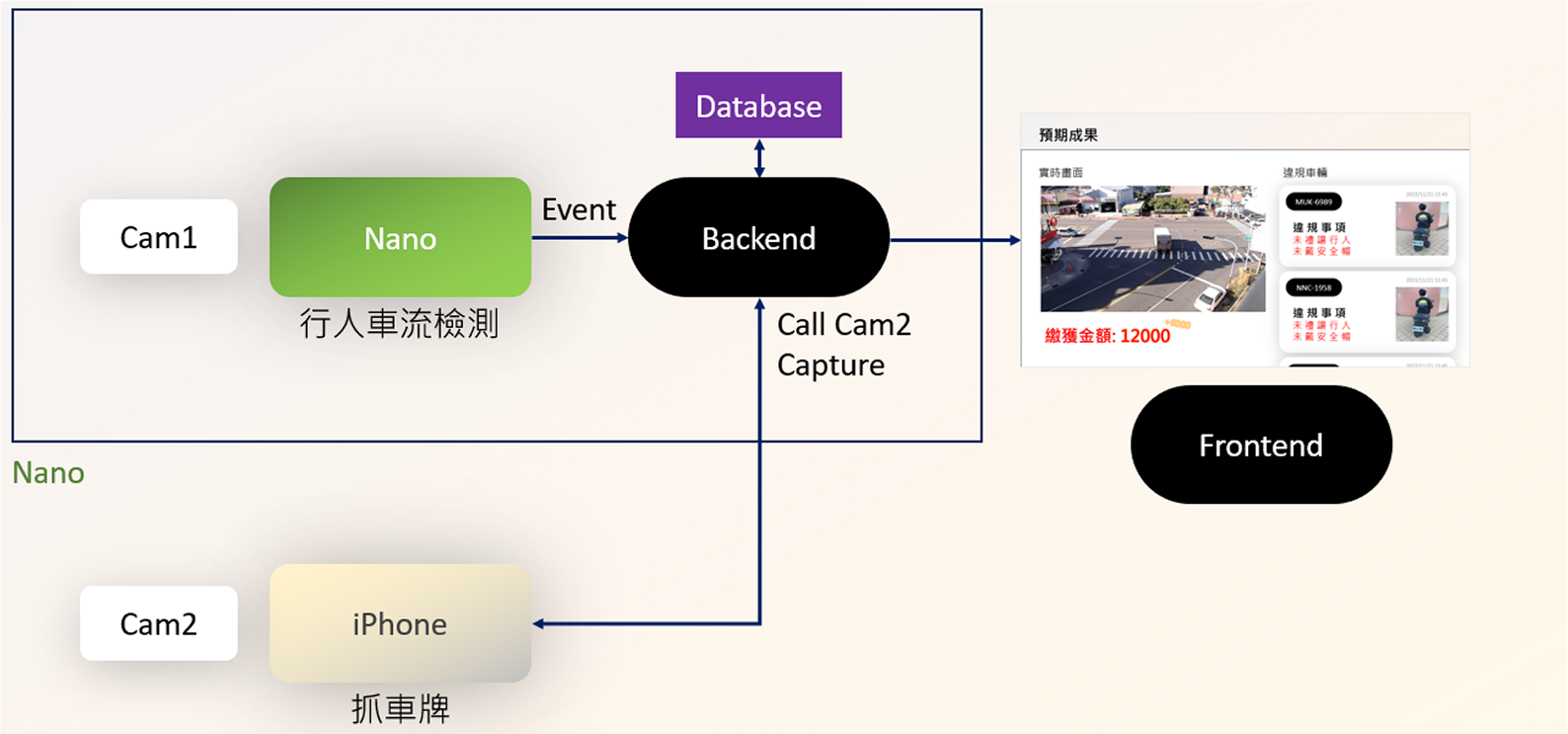
系統架構圖
1. 多視角回追演算法
系統結合 Homography 投影轉換,將空拍與地面影像的車輛座標對齊到同一平面,進行軌跡比對。 當系統偵測到疑似違規事件時,會透過 Socket 通知 iPhone,並比對歷史車牌紀錄。

Homography
這讓我們突破了單一視角的限制,大幅提升追蹤準確性。
2. 高速車牌捕捉
高速行駛的車輛往往讓一般攝影機拍到的車牌模糊。 我們透過 光學原理 + 手動快門控制,確保能捕捉到清晰的車牌,為後續辨識建立基礎。
3. 車牌辨識模組
車牌辨識分為兩部分:
- CoreML 模型(Swift App)
- YOLOv8n 訓練 (自拍資料集) → CoreML 量化。
- iPhone App 直接捕捉並辨識車牌,無需網路或額外電源。
- 為了避免模糊,我們還特別設定了相機的高速快門。
- PaddleOCR
- 負責辨識與比對捕捉到的車牌文字。
- 能將 CoreML 偵測到的車輛影像,進一步確認身份。
4. 載具與行人偵測
在 Jetson Nano 上,我們部署了 YOLOv8n + TensorRT 量化模型:
- 行人偵測:判斷行人是否在「等待」或「穿越」。
- 車輛偵測:分析車輛軌跡,與行人動態比對,判斷是否違規。
- 量化優化:使用 VisDrone 資料集訓練,TensorRT 加速推理,確保 Nano 能即時處理。
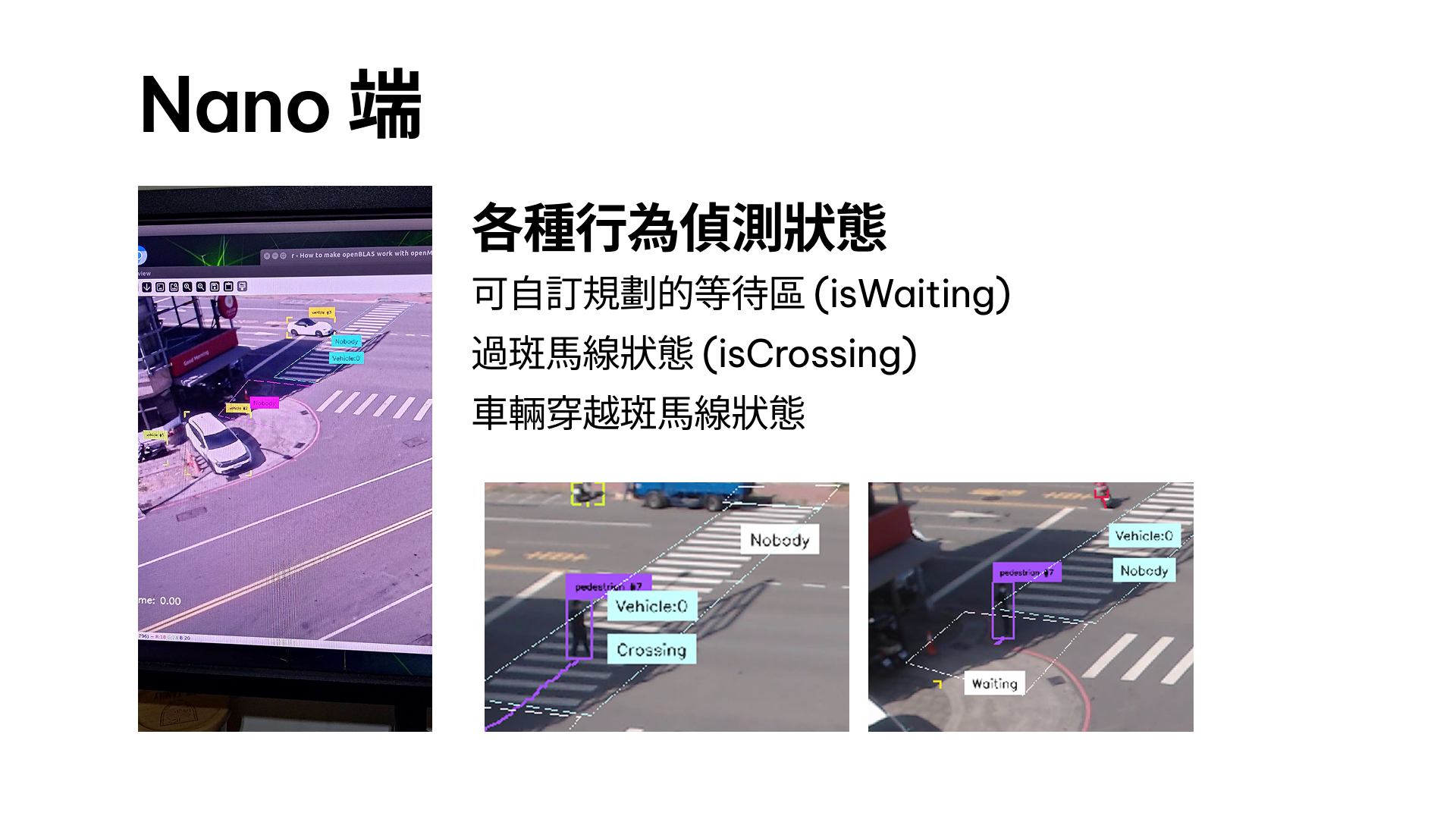
各種行為偵測狀態
五、 違規判斷規則
無號誌場景
- 規範:車輛必須禮讓正在等待或穿越的行人。
- 違規:若車輛在有人等待或穿越時仍通過,即為違規。
有號誌場景
- 綠燈:斑馬線有人,車輛應禮讓;若直接通過即為違規。
- 紅燈:車輛不得通過斑馬線;若斑馬線或等待區有人時仍通過,即為違規。
六、 實作結果
我們的成果包括:
- 即時性:TensorRT 加速讓 YOLO 模型在 Nano 上流暢運行。
- 多視角追蹤:Homography 成功整合空地雙視角。
- 車牌清晰度:快門控制讓高速車輛車牌可清楚辨識。
- 雙模組車牌辨識:CoreML + PaddleOCR 提升準確率。
- 違規判斷:結合行人與車輛軌跡,能準確取締未禮讓行人。
Demo 影片
Taoyuan, Taiwan | © 2026 Hong Yu Chang